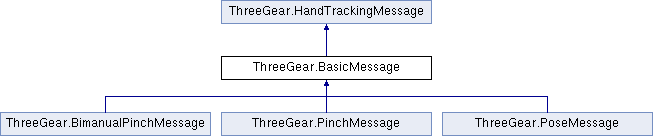
The most basic form of the hand tracking message includes a type, which hand was updated, and the position and rotational frame of each hand. The hand rotation is specified as a quaternion (x,y,z,w).
More...
|
 Public Attributes inherited from ThreeGear.HandTrackingMessage Public Attributes inherited from ThreeGear.HandTrackingMessage |
| const int | N_JOINTS = 17 |
| | The number of joints in the hand model, currently 17 (arm, wrist, and 3 each for the 5 fingers). More...
|
| |
| const int | N_FINGERS = 5 |
| | The number of fingers is five (thumb, index, middle, ring, pinky). More...
|
| |
| const int | N_HANDS = 2 |
| | Two hands (left and right). More...
|
| |
| const int | N_POSES = 7 |
| | The number of specifically recognized poses. More...
|
| |
| const int | N_FINGER_DOFS_PER_HAND = 16 |
| | The number of finger degrees of freedom per hand. More...
|
| |
| Properties inherited from ThreeGear.HandTrackingMessage |
| MessageType | Type [get] |
| | The message type is useful for distinguishing between similar messages, e.g., between PRESSED and RELEASED, which are both PinchMessages. More...
|
| |
The most basic form of the hand tracking message includes a type, which hand was updated, and the position and rotational frame of each hand. The hand rotation is specified as a quaternion (x,y,z,w).

 1.8.3.1
1.8.3.1

