 |
3Gear Systems SDK
v0.9.34
|
|
3Gear Systems SDK
v0.9.34
|
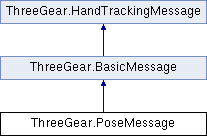
Message that exposes the hand skeleton information for both hands. More...
Public Member Functions | |
| PoseMessage (BasicMessage pinchMessage, float[] confidenceEstimates, Quaternion[][] jointRotations, Vector3D[][] jointTranslations, Vector3D[][] fingerTips, float[][] handPoseConfidences, float[][] fingerDOFs) | |
| Constructs a PoseMessage. Should not generally be called by users of the API. More... | |
| override string | Serialize () |
| Serialize the message to a string, which could then be sent using the network protocol. More... | |
Static Public Member Functions | |
| static new PoseMessage | Parse (TokenStream tokenStream, MessageType type) |
Properties | |
| Matrix3D[][] | JointFrames [get] |
| The joint frames of all the bones; used for skinning. More... | |
| Quaternion[][] | JointRotations [get] |
| The joint rotations for all the bones indexed using the ThreeGear.JointFrameIndex enum. More... | |
| Vector3D[][] | JointTranslations [get] |
| The joint positions for all the bones indexed using the ThreeGear.JointFrameIndex enum. More... | |
| Vector3D[][] | FingerTips [get] |
| A point at the end of each finger. More... | |
| float[] | ConfidenceEstimates [get] |
| How confident we are about the pose. More... | |
| float[][] | HandPoseConfidences [get] |
| Experimental function that returns how confident we are that the hand is in a given pose. More... | |
| float[][] | FingerDOFs [get] |
| Joint angles for the fingers. More... | |
Additional Inherited Members |
Message that exposes the hand skeleton information for both hands.
|
inline |
Constructs a PoseMessage. Should not generally be called by users of the API.
|
inlinevirtual |
Serialize the message to a string, which could then be sent using the network protocol.
Reimplemented from ThreeGear.BasicMessage.
|
get |
How confident we are about the pose.
This is a value between 0 and 1. Currently only values of zero (0) and one (1) are ever returned, but we expect this to change in future versions.
|
get |
Joint angles for the fingers.
These are the actual joint angles for each finger, which can be used to determine which fingers are bent for gesture recognition. Index this using the ThreeGear.FingerDOF enum.
For more details on the hand model, consult the hand model docs.
|
get |
A point at the end of each finger.
|
get |
Experimental function that returns how confident we are that the hand is in a given pose.
Returns the confidence score for each pose. Each confidence score is a value between 0 and 1 and they sum to 1. Please use the the HandPose enum to index into the array.
|
get |
The joint frames of all the bones; used for skinning.
These should be indexed using the ThreeGear.JointFrameIndex enum.
For more details on the hand model, consult the hand model docs.
|
get |
The joint rotations for all the bones indexed using the ThreeGear.JointFrameIndex enum.
|
get |
The joint positions for all the bones indexed using the ThreeGear.JointFrameIndex enum.
 1.8.3.1
1.8.3.1


 Public Member Functions inherited from
Public Member Functions inherited from